


I am a PhD candidate at Stanford University, advised by Professor Iro Armeni in the Gradient Spaces Lab. My research focuses on deep learning-based computer vision for understanding evolving 3D scenes over time (4D), spanning both dynamically changing lived-in spaces (robotics and embodied AI) and structurally evolving scenes with large-scale spatio-temporal changes (building construction monitoring). My research is graciously funded by the TomKat Center Graduate Fellowship for Translational Research.
Previously, I completed my BASc in Mechatronics Engineering with a Computing Option at the University of Waterloo, graduating with distinction. I gained industry experience through co-op positions in hardware research and software engineering.
CONTACT
Email: easteine [at] stanford [dot] edu



Publications
My current research focuses on 3D/4D scene understanding, spatio-temporal semantic representations, and datasets, benchmarks, and metrics for dynamically changing scenes. If you find my work interesting and would like to chat, feel free to reach out!
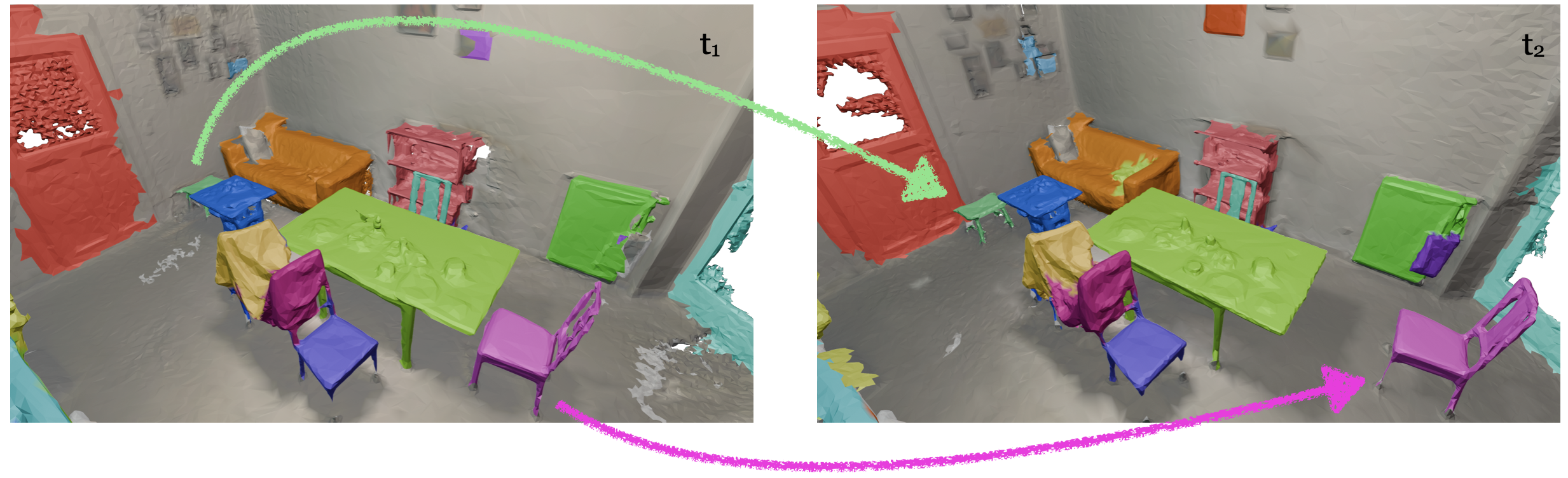
ReScene4D: Temporally Consistent Semantic Instance Segmentation of Evolving Indoor 3D Scenes
Emily Steiner, Jianhao Zheng, Henry Howard-Jenkins, Chris Xie, Iro Armeni
• Under Review, 2026
• Code / Project / Preprint (coming soon)
Research Positions
Gradient Spaces Lab | PhD Candidate | Advisor: Iro Armeni, Stanford University
April 2024 - present | Lab website ↗
Computational Imaging Lab | Rotation PhD Student | Advisor: Gordon Wetzstein, Stanford University
Winter 2024 | Lab website ↗
Projects
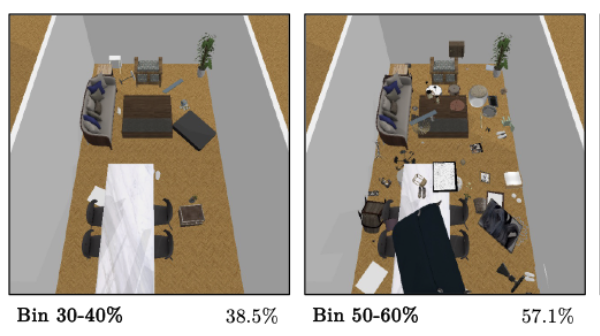
Probing the Object Awareness of Current 3D LLMs
Designed and conducted systematic perturbation experiments revealing density-induced hallucination and bottlenecks in object detection capabilities of state-of-the-art 3D-LLM architectures.
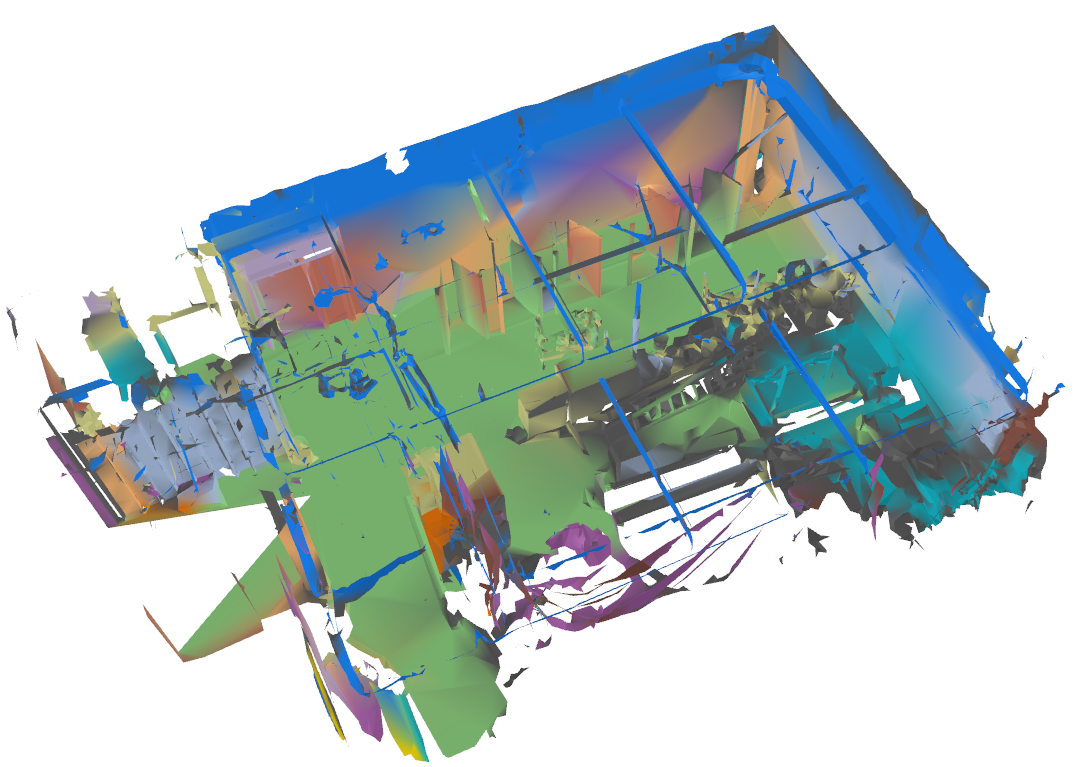
Towards Open Scene Understanding For Construction Analysis
Developed an integrated pipeline to lift 2D semantics from foundational vision models into unified 3D mesh representations for zero-shot, query-driven monitoring on dynamic construction datasets.
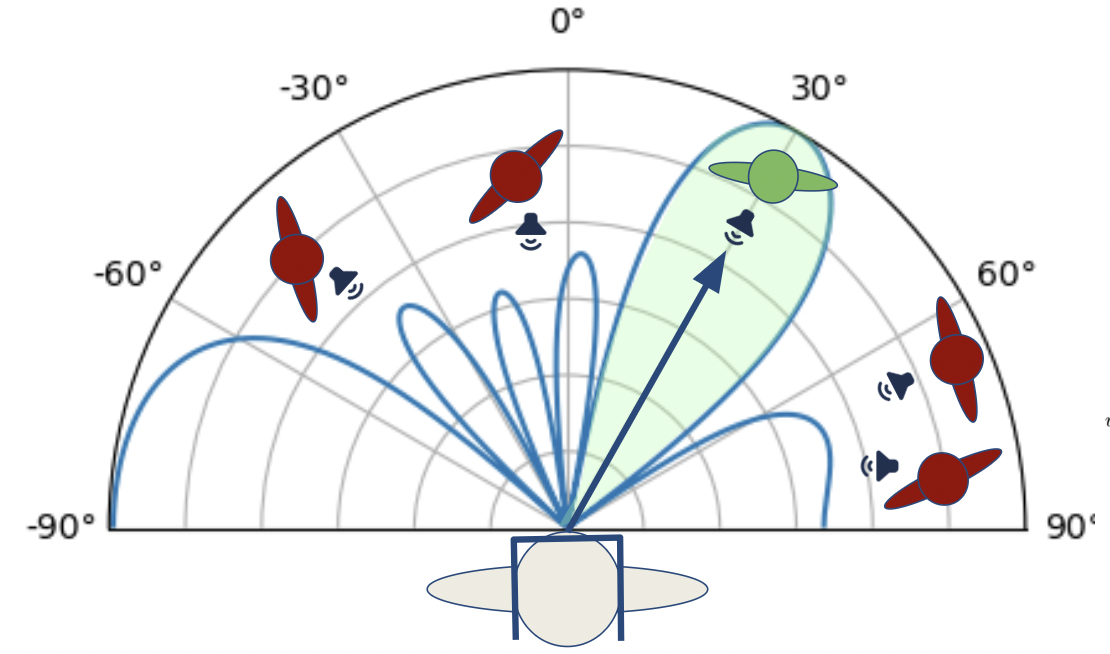
Viability of Eye-Tracking Glasses for Beamforming Hearing-Aids
Engineered and simulated a spatial audio steering system using microphone-enabled glasses, demonstrating enhanced source isolation via eye-tracking-driven beamforming for assistive hearing technology.
Drag Reduction System Automation
1st Place Winner of the University of Waterloo Design Analysis Competition Sponsored by Ansys
Capstone project in collaboration with Williams Racing Formula 1. Designed a system to automate movement between testing positions for the wind tunnel model's drag reduction system without affecting aerodynamic surfaces.
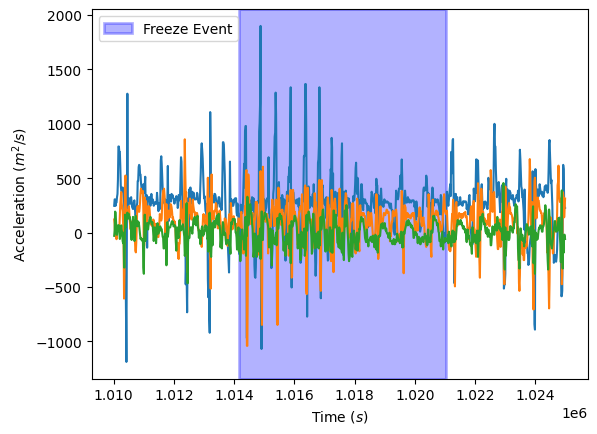
Comparison of ML Techniques for Freezing of Gait (FoG) Detection
Investigated the trade-offs of various published machine learning techniques for the detection of Freezing of Gait using tri-axial IMU sensors, comparing accuracy, computational complexity, and real-time performance.
Industry Experience
May - August 2022
Hardware Research & Development Engineering Co-op
Lumafield
Investigated CT scanner imaging limitations to characterize the trade-off between sharpness and scan time. Determined system parameter improvements for a 3x speed increase with no loss in quality; changes implemented on customer machines and showcased at trade shows. Created an exploratory multi-detector prototype, developed an image processing pipeline using OpenCV in Python, and implemented a joint iterative calibration algorithm based on current literature. Improved capture speed by 200% with minimal impact on image quality.
January - April 2022
Product Development Intern (Electrical / Mechatronics)
Inertia Product Development
Designed and implemented a LiDAR point cloud visualizer using Python and Qt to interface with a Robot Operating System (ROS) backend, enabling real-time visualization of sensor data for autonomous systems development. Conducted feasibility studies for customer projects, using rapid prototyping to evaluate technical approaches and determine optimal solutions for product development success.
May - August 2021
Aerospace Engineer
Canadensys
Designed embedded state machine architecture and PID controller, implementing firmware on an STM32 Microcontroller in C for a high precision BLDC motor controller. Performed control system and stability analysis using Simulink. Conducted root cause analysis to identify a fundamental hardware design error causing unstable motor feedback. Implemented a corrective software algorithm for Hall Effect sensor processing, salvaging the PCB design and avoiding costly hardware redesign.
January - April & September - December 2020
Software Engineering Co-op Student
ExactEarth (Spire)
Developed autonomous operations management software responsible for communication procedures, telemetry collection, and recovery processes of the EV10 satellite. Supported the software control system throughout satellite commissioning and post-launch operations (launched Sept 2020).
Teaching & Mentorship
- Teaching Assistant, "Computer Vision for the Built Environment" CEE 247C, Stanford University, Winter 2026. Course website ↗
- Graduate Mentor, Stanford Women In Electrical Engineering (WEE), 2024-present.
- Undergraduate Mentor, University of Waterloo Mechatronics Mentorship Program, 2020-2022. Guided freshmen engineering students through their first round of internship applications by reviewing resumes, providing interview preparation, and career advice.
Leadership & Involvement
- Stanford Women In Electrical Engineering (WEE), 2023-present.
- Faculty Liaison (2024-26): Responsible for organizing quarterly faculty roundtables.
- Co-Mentorship Chair (2025-26): Co-organizer and mentor in the mentorship program and volunteer at STEM education outreach events (Stanford SPLASH, SLAC community day).
- ICRA 2025 Challenge Organizer, Nothing Stands Still Challenge Hosted by Hilti, 2025. Challenge website ↗
- Stanford Cycling Team, Women's Road Captain, 2026.
- Athena, Workplace Under-Represented Genders in Tech Group, 2022.
Honours & Awards
- TomKat Graduate Fellow in Translational Research, Stanford University, 2025. TomKat Center profile ↗
- Co-Operative Education Student of the Year Honourable Mention, University of Waterloo, 2022. News article ↗, Media Profile ↗
- First In Class Engineering Scholarship, University of Waterloo, 2019, 2021, 2022.
- President's International Experience Award, University of Waterloo, 2019.
- President's Scholarship of Distinction, University of Waterloo, 2018.